|
对于机器而言,视觉是测距的过程,雷达或是红外线传感器发射的光束打在障碍物上会反射回来,通过发射到反射回来的时间计算出距离,从而知道那个位置有某个东西存在。
机器视觉远不能达到人眼的效果,但机器的优势在于可以穿透障碍物看到它背后的东西。今年早些时候,麻省理工学院研发了一款微波摄像机,可以拍到障碍物背后的3D图像。这款摄像机与微软最新的Xbox Kinect感测器的工作方式相同,发射微波脉冲并追踪获得反馈的时间,并利用计算机成像技术生成图像。但是这种成像技术很慢,需要花费较长的时间。如果你想知道拐角处是否有车过来,它是没办法及时做到的。

由ScanLAB Projects制作的无人驾驶汽车的“眼中”世界
英国赫瑞·瓦特大学的物理系博士生 Genevieve Gariepy和她的同学们一起研发了一套跟激光雷达类似的系统,不过反应更快更灵敏,它可以在短短几秒钟检测出隐藏的物体。
该摄像头采用回声定位技术,定位盲区附近的物体。同时,其先进的摄像头模块非常敏感,它可以跟踪单个光子的光。系统会向周围发射数百万的脉冲波,当这些脉冲波到达地面后会以球状波发散出去,碰到障碍物后会再反射回来,当这些反射回来的光出现在摄像头的“视线”范围内,通过计算来回的时间,就可以判断出障碍物的位置。摄像头以200 亿帧/秒的速度进行拍摄,位置的精确度能达到厘米。
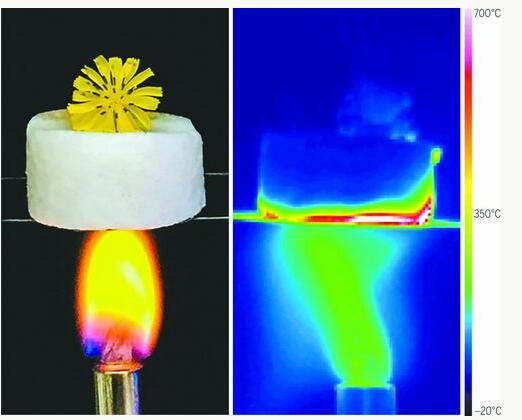
根据他们在Nature Photonics上发表的论文,他们用一个30厘米高的泡沫小人当做实验对象,让小人以每秒2.8cm的速度移动,在这个过程中监测出小人的具体位置。Gariepy表示目前他们只是通过这个实验证实了这个概念的可能性,未来他们希望将这项技术应用于真实的环境中,比如汽车系统,可用于避免汽车的碰撞。

step 1:观察角落

step 2:定位隐藏物体

step 3:计算出具体位置

step 4:运动目标的移动跟踪

团队希望能更快更远地检测。现在得到具体位置需要花费5秒钟,3秒钟是SPAD相机用来接收数据,另外2秒是用来计算的。他们希望将整个过程压缩到1秒。而在检测距离上,目前只能检测到1米左右距离的物体,而他们希望能实现10米的检测。
现在的无人驾驶汽车同样使用的是激光雷达来检测前方是否有障碍物,从而保障交通安全。但面对现实生活中无处不在的变数,无人驾驶需要更加明慧的“眼睛”才能将安全风险降到最低。当然,他们也同时面临一些激光雷达普遍存在的问题,比如当空气中有雾、有灰尘、有烟时,是无法进行检测的。
|
 收藏
收藏 打印
打印