|
作为一项高精尖技术,「激光雷达」被用于航天、测绘、自动驾驶等领域,但体积、成本、工作环境等因素仍对其有所制约。 其实早在 2016 年 8 月,MIT(美国麻省理工学院)就联合 DARPA(美国国防部高级研究计划局)给出了一个解决方案:将激光雷达传感器封装到单芯片上, 尺寸仅 0.5 毫米×6 毫米(下图是激光雷达和一枚十美分硬币的对比图)。
这一设计被称为 lidar-on-a-chip,采用 CMOS 晶圆厂的 300mm 制造工艺,一颗传感器的生产成本在 10 美元左右,相比市面上的激光雷达传感器来说简直是白菜价——据美国电气电子工程师学会旗舰出版物 IEEE Spectrum 当时报道,商用高端激光雷达系统的价格在 1000 到 70000 美元之间。 那时,MIT 光子微系统小组就希望将体积大、价格高的机械激光雷达系统集成到微芯片上,实现量产。 如今,MIT 和 DARPA 的激光雷达传感器研发工作仍在继续。不久前 MIT 展示了新型固态 lidar-on-a-chip。2020 年 12 月 1 日,IEEE Spectrum 发表了一篇报道,讲述了 MIT 是如何推进下一代激光雷达传感器发展的。
MIT 成立 Kyber Photonic 应对挑战 所谓激光雷达即 LiDAR,是以发射激光束探测目标的位置、速度等特征量的一种雷达系统。激光雷达传感器通过扫描波长 850-1550 纳米的光束、利用反射的光信号建立区域三维地图,从而提供空间信息。不论是白天还是夜间,激光雷达都能提供高分辨率及明确的范围和速度信息。 其工作原理是,向目标发射探测信号,将反射回来的信号与发射信号进行比较并作适当处理,从而获得目标的众多参数。 激光雷达能够获取三维地理信息,不仅能作军事用途,相关数据也被广泛用于资源勘探、城市规划、农业开发、环境监测、交通通讯、防震减灾等众多方面。 工业界,自动驾驶、机器人(比如扫地机器人、物流机器人)、无人机、乃至 iPad Pro 2020 和 iPhone 12 Pro 系列中,均有激光雷达加持。 激光雷达传感器可帮助自动驾驶汽车探测到其他车辆、自行车、行人以及道路上任何构成潜在危险的障碍物,它获取到的信息至关重要,因而也被称为是自动驾驶汽车的眼睛。 诚然,测距激光雷达有望使得机器以非常高的精度观察世界并对机器进行导航,但在激光雷达被自动驾驶车辆和机器人广泛使用之前,激光雷达传感器需要大量生产,性能需要提升,成本也需要比目前的商用系统成本(几千美元上下)低两个数量级。 MIT 表示: 全自动驾驶汽车的应用空间更加凸显了激光雷达行业面临的性能与发展挑战。 激光雷达面临的具体要求比如: 单位成本约 100 美元; 200 米范围以外反射率在 10% 左右; 最小视野(FOV)为水平 120°、垂直 20°; 角分辨率 0.1°; 每秒至少 10 帧,每帧十万像素; 制造速度每年数百万个。 2020 年年初,MIT 成立了一家名为 Kyber Photonic 的公司,旨在通过新的集成光子设计来解决上述挑战。 Kyber Photonic 联合创始人、CEO Josué J. López 在莱斯大学获物理学学士学位,在 MIT 获理学硕士学位,目前在 MIT 攻读电子工程博士学位。 他在下一代成像和传感技术方面拥有十年的经验,是非营利组织 Activate 2020 Fellow,获得了由 DARPA 支持的一项为期两年的奖学金(这项奖学金旨在帮助科学家们将创新成果推向市场)。
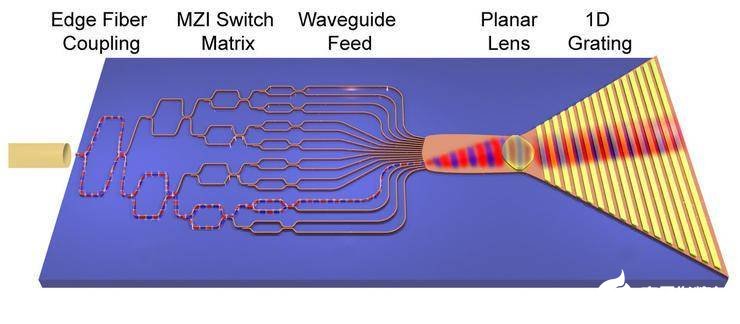
在 DARPA 的支持下,MIT 在 Kyber Photonic 的一个小组设计了新型固态 lidar-on-a-chip 结构。MIT 表示: 与目前最先进的激光雷达相比,这一设计视野相当广阔、控制方法简单,并有希望通过集成光子学产业的晶片规模制造方法,将规模扩大到数百万个单元。 新型固态 lidar-on-a-chip 结构 IEEE Spectrum 拆解了该结构的两个关键概念。 一是固态,即不使用活动部件,消除了机械模式的故障。 二是 lidar-on-a-chip,指将激光、电子、探测器和光学光束控制机制全部集成到芯片上。 正是由于这一架构可以充分利用与 CMOS 兼容的材料、半导体行业建立的晶片规模制造方法,现存的激光雷达难题有望被解决。正如 IEEE Spectrum 在报道中所说的那样: 一旦最终的解决方案被证实,我们就可以预期,激光雷达传感器就像电脑、手机内部的集成电路一样,每年生产数亿个。 具体来讲,MIT 光子学团队和 MIT 林肯实验室的研究人员合作开发了固态光束转向的替代解决方案。 过去 3 年,研究人员已经设计、制造并在实验中成功演示了一种新的固态波束控制架构,这一架构可在近红外环境下工作。 下图是基于平面透镜的光束转向架构示意图:近红外激光通过光纤耦合到芯片上,激光穿过由马赫-曾德尔干涉仪(MZI,主要用于观测从单独光源发射的光束分裂成两道准直光束之后,经过不同路径与介质所产生的相对相移变化)开关树形成的光开关矩阵,然后光线被馈送到一个平面透镜中,平面透镜既可准直光,也可将光转向,通过光栅将其散射到平面外。
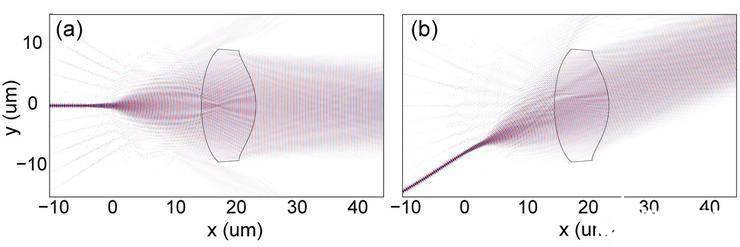
下图是芯片的二维横截面,整个水平视场被从波导发射的光束覆盖。
基于此,一个分辨率为 0.1° 的 100° FOV 激光雷达系统也能实现了。可以说,这一架构能够满足激光雷达应用所需的 FOV 和分辨率要求。 实际上,这一方案的其中一处灵感来自于罗特曼透镜(Rotman lens)。 20 世纪 50 年代后,随着跟踪雷达、卫星通信等领域对多目标应用环境的要求增加,基于准光学原理的透镜多波束技术出现,而罗特曼透镜则是其中最著名的一项技术。无需有源电子相位控制,罗特曼透镜就能在微波环境下实现无源波束形成网络。 与此同时,为满足激光雷达 200 米的射程要求,研究人员还为相干检测方案(MIT 称之为调频连续波,FMCW)设计了系统,而不是传统的利用飞行时间(ToF)的检测方式。 据了解,FMCW 的优势在于:可提供瞬时速度信息、不易受其他光源干扰。尽管成本、产量等因素还未得到验证,几家射程超过 300 米的激光雷达厂商已成功演示了 FMCW。 那么,该结构效果如何? 研究人员使用光纤耦合可调激光器对波长 1500-1600 nm 的平面透镜光束转向进行了测试。测试证实,新型固态 lidar-on-a-chip 的 FOV 可达到水平 40°、垂直 12°。经过一番调整后,其 FOV 甚至达到了水平 160°、垂直 20°。 下图显示了芯片在平面透镜光束的控制下红外图像组成的动画。
展望未来,MIT Kyber Photonic 研究人员表示: 我们的最终目标是,在未来的两到三年内实现一个钱包大小的激光雷达芯片单元,并且拥有一条清晰的生产路径,实现低成本、高可靠性、高性能和可扩展性,适用于自动驾驶汽车等行业。 |


 收藏
收藏 打印
打印